La división Tecnológica de Disney y la Escuela Politécnica Federal de Zúrich trabajaron juntas para la creación de un vehículo robótico llamado: VertiGocuya principal función es desplazarse en paredes gracias a las características de su construcción y que nosotros preferimos llamarle Spyderbot dadas sus habilidades.
Pero, ¿Cómo lo hicieron?
Disney Research explica en un documento oficial de investigación que se realizó para crear a Vértigo que los elementos principales para que este robot pueda desafiar la gravedad residen en la estructura de fibra de carbono, el tamaño de sus cuatro ruedas y las dos hélices centrales. Es justamente el empuje que crean éstas últimas —hacia la pared y hacia arriba— lo que provoca que VertiGo pueda recorrer las paredes sin tener que depender de las características de la superficie.
¿Con que fines se creó este robot?
Este robot de Disney Research y la Politécnica de Zürich podrá ser utilizado no solo para la industria cinematográfica sino también en otros ámbitos.
Ellos mencionan:
"Nuestras aplicaciones y logros en investigación son experimentadas por millones de personas, sin que aveces se den cuenta. Honramos el legado de Walt Disney al innovar y desplegar nuestras innovaciones en una escala mundial", este es un fragmento de la frase final del texto en donde se explican los objetivos de los laboratorios de Disney Research.
En resumen:
Cómo vemos, Vértigo ha extendidio la capacidad de los robots para viajar a través de los entornos urbanos e interiores siendo capaz de moverse en una pared velozmente y con agilidad, y que nosotros preferimos llamarlo "Spyderbot".El uso de hélices para proporcionarempuje siempre le garantizará al robot ser capaz de atravesar toda mampostería. Y La elección de dos hélices en lugar de uno permite una total transición desde el suelo hasta la pared
Un diminuto dispositivo que se conecta a los nervios de pacientes para trasladarles a sensaciones por falta de sus miembros.
Un grupo de Investigadores del Ecole Polytechnique Fédérale de Lausanne desarrollan un dispositivo que podrá darles a las personas con dedos amputados, sensaciones similares al tacto.
Este pequeño dispositivo utiliza sensores capaces de detectar las ondulaciones de las superficies, para convertir las sensaciones físicas a señales eléctricas que son transmitidas a los nervios de los pacientes.
Este pequeño dedo biónico se ha estado provando en pacientes como Dennis Aabo Sorensen, quien explica su experiencia:
"La estimulación se siente casi como sentiría si fuera mi mano… Siento las texturas en la punta de dedo índice de mi mano fantasma"
Este dedo biónico ha sido capaz de ofrecer a los pacientes sensaciones como la rugosidad y la suavidad con gran precisión. Incluso, los investigadores han realizado experimentos con personas que no les falta ningún miembro, y los resultados los han llevado a concluir que lassensaciones que otorga un dedo real con la prótesis experimental son muy parecidas.
EN RESUMEN:
A pesar del éxito del estudio, los investigadores se han preguntado si el tacto del dispositivo artificial realmente se asemeja a los sentimientos de tocarlo con un dedo real.
Para comprobarlo han comparado la actividad de las ondas cerebrales de los no amputados una vez con el dispositivo artificial y otra con su propio dedo. Los escáneres recogidos revelaron que las regiones que se activaban en el cerebro eran similares.
Falta aún más investigación y desarrollo, pero se trata de un gran avance que en definitiva ayudará a pacientes y aplicaciones tanto en áreas como la robótica o la militar. Los resultados del estudio fueron publicados en eLife.Opinar es gratis, no olvidescompartir ;)
Rasperry Pi vs el Mundo: comparativa y la contrastante competencia
hoy en día Rasperry Pi se ha convertido en un icono mundial de los mini-ordenadores. Rasperry Pi, desde su introducción al mercado mundial, llegó por sorpresa y como todo, pues, la industria no ha dejado esperar para responder y lanzar tarjetas que superan de manera exponencial las capacidades de "Rasperry".
Será que: ¿tenemos alternativas mejores?
Veamos a continuación:
La tabla de abajo muestra a la competencia, así como los precios y características más destacadas frente a Rasperry, hemos seleccionado las placas más potentes y poderosas del mercado que nos dejan en la imaginación "esa sensación" de que con tener una en nuestras manos podríamos mover hasta un satélite .
hemos echo un corte a la imagen para que puedas ver mejor todas las características (parecen despixeadas pero no,"toca la imagen para ampliarla"), bueno continuemos:
Es evidente que la DragonBoard, BeagleboneBlack, UDOO, y Parallella aparecen como los fuertes contendientes a la Rasperry Pi. Sin embargo, todas estas tarjetas carecen de un factor muy importante del éxito, una comunidad mundial y tutoriales, además <<open source>>.
La Rasperry Pies tan exitosa, que numerosas empresas se han rendido y resurgido solo para el desarrollo de accesorios para la placa.
La competencia es bienvenida, pero en cualquier caso, si esto te parece demasiado avanzado para tus necesidades, siempre puedes coseguirte una Raspberry Pi 3 o la versión Zero y disfrutar de las posibilidades que ofrecen y también de su enorme comunidad mundial. Comenta, no olvidescompartir ;)
Este proyectoes genial pero sin duda ha dado lugar a otros tan interesantes como los de Limbitless Solutions, que construyen brazos biónicos para niños que lamentablemente han sufrido una amputación. Este proyecto tiene como finalidad, motivar a las próximas grandes mentes e ideas promoviendo el interés y aprendizaje en tecnologías biomecatrónicas ayudándolo a mejorar y llevándolo al máximo con alguna aplicación útil.
Importante:
Para este proyecto todos los archivos: desde la impresión 3D,planos,códigos están elaboradas paso a paso en un tutorial por "Gundanium en instructables" listos para ser descargados y empezar a fabricarlos por su cuenta ( "en el video del final de este post, usted debe abrirlo en YouTube y debajo del video encontrará el enlace a instructables").
Explicación y funcionamiento
Se usa un sensor muscular de nombre: (MyoWare) de 4 generación para la medición de la activación del músculo a través de potencial eléctrico, o electromiografía (EMG) , utilizados tradicionalmente para la investigación médica y diagnóstico de los trastornos neuromusculares.
(toque para agrandar la imagen)
Hoy en día, la electromiografía ha encontrado su camino en las prótesis, la robótica y otros sistemas de control. Como una medicina de electrodiagnóstico: permitiendo evaluar y registrar la actividad eléctrica producida por los músculos esqueléticos ("es así como funciona el sensor MyoWare").
Lo que hace es detectar los cambios eléctricos en el potencial de la membrana de los músculos cuando los movemos emitiendo un pulso eléctrico.
El montaje no es complicado y solo tienes que conectarlo a una placa que admita y entienda el input del sensor.
(toque para agrandar la imagen)
Lo que usted necesitará para el proyecto:
Un sensor muscular MyoWare + Electrodos del sensor muscular, Servo HS-7940TH, batería NiMH 7.2V y cargador, Arduino Pro Mini 5V + FTDI y Cable, Pines, brocas y tornillos de cabeza plana, y el software de Arduino IDE.
La Buena noticia:
MyoWare:es un sensor muscular de bajo costo para ser utilizado con todo tipo de microcontroladores (AVR,s, Pic´s, etc) está diseñado para ser utilizados por aficionados, estudiantes, profesionales y a todo interesado en este proyecto, y fabricado por Advancer Technologies.
Una vez montado todo, se manda la señal a los motores para que expulsen o retraigan las garras. y sólo Basta "pensar" con mover los "músculos", tensarlos, si tenemos el puño ligeramente cerrado y eso es todo.
Un artista urbano conocido como: KATSU logró adaptar su dron para hacer grafitis. Ahora, este visionario del spray de pintura acaba de publicar instrucciones detalladas para que cualquiera pueda fabricar su propio cuadricóptero adaptado a esta tarea.
La base, eso sí, no es barato. Se trata de un DJI Phantom 2. KATSU modificó este Dron de radiocontrol para que sea capaz de llevar un bote de pintura. Fabricación Consta de un mecanismo impreso en 3D y activado mediante una placa PCB y software Arduino es el encargado de activar el spray mediante un mando adicional.
EN RESUMEN:
El artista detalla todos los componentes necesarios, el proceso de montaje y hasta cómo programar con Arduino. El resultado es un dron capaz de realizar algunos trazos en lugares de difícil acceso y a distancia.
Aunque la primera prueba de concepto realizada por KATSU probablemente no encaja mucho en lo que consideramos arte urbano, seguro que muchos entusiastas de Arduino y de los drones pueden mejorar el modelo para que pinte más tiempo, con más carga de spray, y con mejor control sobre el trazo
Esta espeluznante serpiente-robot vivirá bajo el mar
No es la primera vez que se ve un robot inspirado en el reino animal (están también el pulpo, la araña, el guepardo), ni es la primera serpiente-robot (también está la serpiente tuneladora, la reptadora de cloacas...), pero "Eelume" ha llamado la atención debido con su nado tan peculiar (ligero, tenue y sueve)y esos ojos espeluznantes siempre listos para inspeccionar instalaciones submarinas.
Se trata de un proyecto en conjunto con la compañía Kongsberg Maritime (los que encontraron al “monstruo” perdido del lago Ness), + la Universidad Noruega de Ciencia y Tecnología y la compañía Petrolera Statoil.
"Eelmune" está inspirado en una anguila que vivirá permanentemente en el fondo marino para realizar tareas básicas de inspección y mantenimiento y ajuste de válvulas en las plataformas petrolíferas del fondo marino.
¿Pero porqué un Robot?
Pues, enviar a los humanos al fondo del mar tiene un coste muy alto que se puede reducir significativamente con ayuda de la robótica. Esta serpiente no sólo jubilará a algunos humanos, sino también a los submarinos autónomos actuales que son muy grandes y complicados de manejar en lugares de difícil acceso.
Un robot que imita a un animal marino es el candidato ideal para estas tareas.
EN RESUMEN
"Eelmune", puede nadar por su cuenta (moviéndose tal como una verdadera anguila) esto es utilizando unos propulsores especiales.
Los diseñadores no han revelado más detalles sobre el robot, aún nada acerca del hardware y software (así que por el momento es un secreto solamente conocido por ellos), y por lo que puede mirarse fácilmente en imágenes parece que depende de un cable de alimentación pero....? en este vídeo se muestra una versión ideal o conceptual de "Eelmune".
Cuando imaginamos un robot, a menudo pensamos en sus movimientos pausados, toscos y voz sintetizada en definitiva “robóticos” (y muy famoso por ese bailecito). Pero los ingenieros y científicos llevan bastante tiempo trabajando en una nuevo tipo de robótica llamada "blanda" (Suave y elástica) con máquinas y prototipos que puedan deslizarse como serpientes u atrapar cosas con sus tentáculos como los pulpos.
Pues esto es lo que un equipo de investigadores italianos llevan años perfeccionando un tentáculo artificial inspirado en los del pulpo.
Sus cables y resortes internos imitan a la perfección los músculos del cefalópodo: pueden alargarse, contraerse, ponerse rígidos, rizarse y ondularse con destreza animal.
Cecilia Laschi, de la Escuela Superior Sant’Anna de Pisa, explica que la robótica blanda es:
“una aproximación completamente diferente a la construcción de robots”.
Más allá de permitirles nadar mejor o atrapar cosas con facilidad, las extremidades blandas como las de los pulpos robóticossimplifican significativamente la programación de los movimientos.
"Crean inteligencia artificial que puede dar color natural a las fotos en blanco y negro de más de cien años"
Un grupo de investigadores de la Universidad de Waseda en Tokio, Japón, ha desarrollado inteligencia artificial capaz de colorear fotos que siempre han sido en blanco y negro, dándoles un aspecto extremadamente natural, como si se tratase de una fotografía que siempre tuvo color.
Se trata de una nueva técnica paracolorear automáticamente las imágenes en escala de grisesque combina ambas distribuciones previas globales y las características locales de la imagen.
Coloración Arquitectura:
El modelo consta 4 componentes principales: un bajo nivel de red, un nivel medio de servicios de red, una red global de características, y una red de coloreado. Unidos y formados de una manera de extremo a extremo. La salida del modelo es la crominancia de la imagen que se fusiona con la luminancia para formar la imagen de salida.
Esta técnica está basada en redes neuronales convolucionales la red cuenta con una capa profunda de fusión que permite fusionar con elegancia información local dependiendo de pequeñas parcelas de imagen con priores globales calculados utilizando la imagen completa. El marco entero, incluyendo las distribuciones previas globales y locales, así como el modelo de la coloración, se entrenó de manera de extremo a extremo.
La arquitecturapuede procesar imágenes de cualquier resolución, a diferencia de la mayoría de los enfoques existentes sobre la base de la CNN.
Aprovecharon una base de datos existente de escenas de clasificación a gran escala para entrenar a nuestro modelo, la explotación de la clase de etiquetas del conjunto de datos de manera máseficiente y discriminadamente aprender los priores globales.
Actualmente se trabaja paravalidar nuestro enfoque con un estudio de usuarios y comparar contra el estado de la técnica, en el que mostramos mejoras significativas. Además, demostraron este método ampliamente en muchos tipos diferentes de imágenes,incluyendo la fotografía en blanco y negro de hace más de cien años, y mostramos coloraciones realistas.
[EN RESUMEN]
La inteligencia artificiales capaz de lograr esto sin ningún tipo de intervención ni ayuda humana, dado que su sistema se basa en el uso de redes neuronales convolucionales (un tipo de red neuronal artificial), la cual aprendeymejora con el paso del tiempo.
Básicamente lo que hace esta inteligencia artificial es analizar y clasificar las imágenes por completo, identificando cada una de suspartes y componentes para así determinar qué coloresdebe usar para rellenarlos y darles el aspecto máximo natural posible.
Y el resultado es impresionante. Cada una de la fotos que el sistema del equipo de Waseda coloreó pareciera que nunca hubiese sido una foto en blanco y negro. Para demostrarlo el equipo publicó un considerable lote de imágenes editadas y antes de su “transformación” a color, las cuales puedes ver a continuación.
La Raspberry Pi 3 está causando sensación y furor, pero el modelo UDOO X86 es 10 veces más potente.
En sólo unos años Raspberry Pi
se ha extendido por todo el planeta. Se han vendido millones de
unidades y, con cada versión se han mejorando, e ido haciendo más y más potentes (y
también más pequeña, si tenemos en cuenta al modelo Zero de sólo 5 dólares de precio).
Quién iba a decirnos hace unos años que se podría tener un ordenador
prácticamente completo en la palma de la mano, con esa potencia y por
menos de 45$ USD. Muchos otros quieren replicar el éxito de Raspberry Pi y para ello tienen que mejorar lo que hay en el mercado.
¿Qué es lo sorprendente?
UDOO X86, es capaz de mover 3 monitores 4K al mismo tiempo.
(toque para agrandar la imagen)
De entre todas esas alternativas que quieren robar protagonismo a Raspberry Pi hoy nos centramos en UDOO X86, cuyo objetivo es convencer a todos esos usuarios a los que la Raspi 3 se les queda corta.
Así, esta pequeña placa se presenta como la más potente creada, en concreto – por comparar – es 10 veces más potente que la Raspberry Pi 3
y no se queda corta en cuanto a conectividad y compatibilidad con otras
piezas, siendo además compatible con la plataforma Arduino 101, todo
desde la misma placa.
Es perfecto para construirte un ordenador básico por menos de 89 dólares
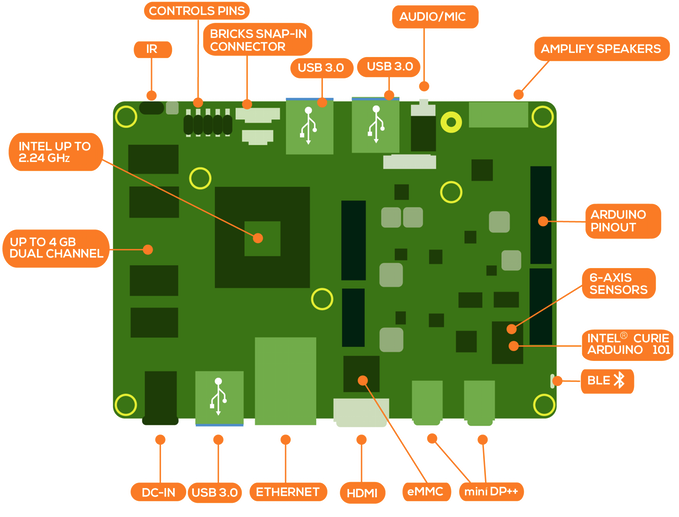
El corazón del UDOO X86 es un procesador Intel Braswell de cuatro núcleos a 2.0GHz, mientras que hay un modelo Advanced con un Braswell a 2,4GHz. Monta 2GB o 4GB de RAM,
8GB de almacenamiento con conectores Sata y puerto microUSB, Internet
Gigabit, 3 puertos USB 3.0, salida HDMI y dos MiniDisplayPort…
Es decir que el UDOO X86 es la alternativa más completa. Recordemos que una de las
grandes novedades de la Raspberry Pi 3 fue la integración de la conectividad Bluetooth y WiFi
en la placa. Aquí no lo integra, pero sí podemos añadirlo con cualquier
solución USB del mercado (a cambio ganamos la conexión Internet
Gigabit).
Además, es compatible con cualquier sistema operativo de 64 bits, así que se puede instalar cualquier distribución Linux X86, Android o Windows 7, 8.1 y hasta la última versión Windows 10.
¿Pero cuáles son sus usos?
(toque para agrandar la imagen)
Los usos para este potente miniPC son múltiples:
Puedes usarlo como centro multimedia, pudiendo hacer streaming de contenido 4K sin problemas, como una potente máquina arcade para mover cualquier juego clásico (y alguno moderno, pero no es lo más adecuado) o, por qué no, para montar un ordenador básico para el hogar: sería perfecto para ejecutar tareas básicas a nivel ofimático, consultar email y navegar por Internet.
(toque para agrandar la imagen)
Eso sí, con tanto potencial, el precio es normal que sea superior al
de la Raspberry Pi 3, aunque tampoco es desorbitado. El UDOO X86 se
puede conseguir desde 89$, aunque diferentes packs que también pueden interesarte. Todos los detalles están es su proyecto de KickStarter,donde “está causando agrado”, y duplicando su financiación en unas horas.
La competencia es bienvenida, pero en cualquier caso, si esto te parece demasiado avanzado para tus necesidades, siempre puede comprar una Raspberry Pi 3 y disfrutar de las posibilidades que ofrece su enorme comunidad.
Opinar es gratis, no olvides compartir ;)
G
M
T
Text-to-speech function is limited to 100 characters